Automated Driving
Drivers’ anticipation behaviours in autonomous vehicles
 Despite the ambitious plans of vehicle manufacturers, vehicle technologies usually take two to five decades to saturate their potential market, and currently, SAE level-2 automation (SAE J3016_201401) is the state-of-the-art vehicle-automation technology. For this level, drivers are required to visually monitor the driving environment and the automation and anticipate how a given situation may evolve, in order to intervene in a timely manner when necessary. A good design needs to support drivers’ anticipation of both the environment as well as the automated system that they are interacting with. Anticipation in driving in a non-automated context has been defined as “a manifestation of a high-level cognitive competence that describes the identification of stereotypical traffic situations on a tactical level through the perception of characteristic cues, and thereby allows for the efficient positioning of a vehicle for probable, upcoming changes in traffic.” (Stahl, Donmez, & Jamieson, 2014, p. 603). Anticipatory driving has been shown to be more prevalent among experienced drivers (Stahl et al., 2014), but to be inhibited by engagement in secondary activities (He & Donmez, 2018). Anticipatory driving, although arguably an important skill for supervising level-2 vehicles, has not yet been studied for automated vehicles.
Despite the ambitious plans of vehicle manufacturers, vehicle technologies usually take two to five decades to saturate their potential market, and currently, SAE level-2 automation (SAE J3016_201401) is the state-of-the-art vehicle-automation technology. For this level, drivers are required to visually monitor the driving environment and the automation and anticipate how a given situation may evolve, in order to intervene in a timely manner when necessary. A good design needs to support drivers’ anticipation of both the environment as well as the automated system that they are interacting with. Anticipation in driving in a non-automated context has been defined as “a manifestation of a high-level cognitive competence that describes the identification of stereotypical traffic situations on a tactical level through the perception of characteristic cues, and thereby allows for the efficient positioning of a vehicle for probable, upcoming changes in traffic.” (Stahl, Donmez, & Jamieson, 2014, p. 603). Anticipatory driving has been shown to be more prevalent among experienced drivers (Stahl et al., 2014), but to be inhibited by engagement in secondary activities (He & Donmez, 2018). Anticipatory driving, although arguably an important skill for supervising level-2 vehicles, has not yet been studied for automated vehicles.
Sponsor: NSERC (Discovery Grant)
Student PI(s): Dengbo He
Training to improve drivers’ mental models of ADAS and support appropriate reliance
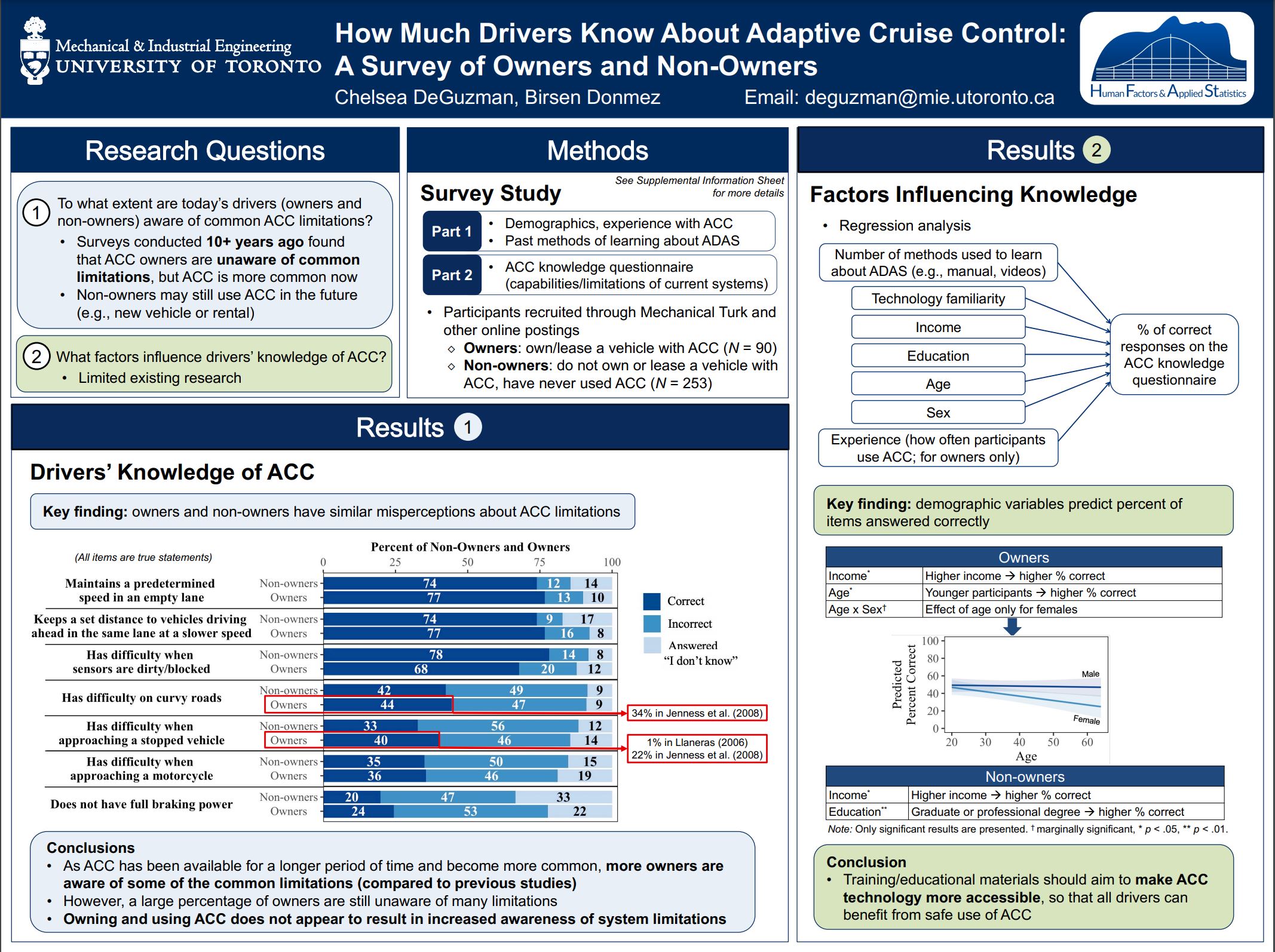
Advanced driver assistance systems (ADAS) are available in an increasing number of vehicles, however, drivers receive little or no training on how to use ADAS safely. This research focuses on studying drivers’ mental models of ADAS, specifically adaptive cruise control (ACC) and lane keeping assist (LKA), which is important to support them in using the automation safely. Through a survey, we found that many drivers overestimate the capabilities of ACC and LKA and that drivers who owned vehicles with ACC and LKA did not seem to have a better understanding of these systems compared to drivers who had never used ACC or LKA. Participants with a worse understanding of ACC and LKA had higher trust in these systems, and higher trust was associated with a greater self-reported likelihood of engaging in secondary tasks while driving. Future studies will involve developing different training methods and investigating their effectiveness at improving drivers’ understanding of ACC and LKA and supporting appropriate trust and reliance on these systems.
Sponsor: NSERC (Discovery Grant)
Student PI(s): Chelsea DeGuzman
Publications
Drivers’ anticipation behaviours in autonomous vehicles
He D., DeGuzman A. C., Donmez B. (Accepted), Anticipatory driving in automated vehicles: The effects of driving experience and distraction. Human Factors: The Journal of the Human Factors and Ergonomics Society. [pre-print]
He, D., Risteska, M., Donmez, B., & Chen, K. (2021). Driver cognitive load classification based on physiological data. In P. Eslambolchilar, A. Komninos, & M. Dunlop (Eds.), Intelligent Computing for Interactive System Design: Statistics, Digital Signal Processing, and Machine Learning in Practice. Association of Computing Machinery, New York, pp. 409-429.
He, D., Kanaan, D., & Donmez, B. (2021). In-vehicle displays to support driver anticipation of traffic conflicts in automated vehicles. Accident Analysis and Prevention, 149, 105842. [post-print]
He, D., & Donmez, B. (2020). The Influence of Visual-Manual Distractions on Anticipatory Driving. Human Factors.
He, D. & Donmez, B. (2019). The influence of driving experience on distraction engagement in automated vehicles. In Proceedings of the Transportation Research Board 98th Annual Meeting (19-01945), Washington, D.C.
He, D., Kanaan, D., & Donmez, B. (2019). A taxonomy of strategies for supporting time-sharing with non-driving tasks in automated driving. In Proceedings of the Human Factors and Ergonomics Society 63rd Annual Meeting (pp. 2088-2092), Seattle, WA.
He, D. & Donmez, B. (2018). The effects of distraction on anticipatory driving. In Proceedings of the Human Factors and Ergonomics Society 62nd Annual Meeting (pp. 1960-1964), Philadelphia, PA. (HFES the Alphonse Chapanis Award Finalist for Best Student Paper, 1 out of 3).
Training to improve drivers’ mental models of ADAS and support appropriate reliance
DeGuzman, C., Kanaan, D., & Donmez, B. (in press). Attentive user interfaces: Adaptive interfaces that monitor and manage driver attention. In I. Alvarez, M. Jeon, & A. Reiner (Eds.), User Experience Design in the Era of Automated Driving. Springer, pp. xx-xx.
DeGuzman, C. A. & Donmez, B. (2021). Drivers still have limited knowledge about adaptive cruise control even when they own the system. Transportation Research Record: Journal of the Transportation Research Board. [post-print]
DeGuzman, C. A. & Donmez, B. (2021). Knowledge of and trust in advanced driver assistance systems. Accident Analysis and Prevention, 156, 106121. [post-print]
DeGuzman, C. A., Kanaan, D., Hopkins, S. A., & Donmez, B. (2021). Takeover request (TOR) effects during different automated vehicle failures. Journal of Intelligent Transportation Systems. [post-print]
DeGuzman, C., Hopkins, S. A., & Donmez, B. (2020). Driver take-over performance and monitoring behaviour with driving automation at system-limit versus system-malfunction failures. Transportation Research Record, 2674(4), 140-151. [post-print]